Электродвигатели появились достаточно давно, но большой интерес к ним возник тогда, когда они стали представлять собой альтернативу двигателям внутреннего сгорания. Особо интересен вопрос КПД электродвигателя, который является одной из главных его характеристик.
Каждая система обладает каким-либо коэффициентом полезного действия, который характеризует эффективность ее работы в целом. То есть он определяет, насколько хорошо система или устройство отдает или преобразовывает энергию. По значению КПД величины не имеет, и чаще всего оно представляется в процентном соотношении или числе от нуля до единицы.
Общие потери и падение КПД
Перси Рафаэль Вьего Фелипе, доктор Хулио Рафаэль Гомес Сардуй, доктор. Университет Сьенфуэгоса Карлос Рафаэль Родригес, Сьенфуэгос, Куба. Трехфазные асинхронные двигатели не всегда работают при полной нагрузке и, следовательно, влияют коэффициент мощности и эффективность. Определить эти значения при разных нагрузках, является основой для программ сбережений в отрасли и услугах. В настоящем документе представлены процедуры оценки коэффициента мощности и эффективности при частичных нагрузках с точностью в соответствии с инженерными целями, низкой инвазивностью и без учета сложности пользователя оборудования или сбора и обработки данных.
Параметры КПД в электродвигателях
Основная задача сводится к преобразованию электрической энергии в механическую. КПД определяет эффективность выполнения данной функции. Формула КПД электродвигателя выглядит следующим образом:
- n = p2/p1
В данной формуле p1 - это подведенная электрическая мощность, p2 - полезная механическая мощность, которая вырабатывается непосредственно двигателем. Электрическая мощность определяется формулой: p1=UI (напряжение умноженное на силу тока), а значение механической мощности по формуле P=A/t (отношение работы к единице времени). Так выглядит расчет КПД электродвигателя. Однако это самая простая его часть. В зависимости от предназначения двигателя и сферы его применения, расчет будет отличаться и учитывать многие другие параметры. На самом деле формула КПД электродвигателя включает намного больше переменных. Выше был приведен самый простой пример.
Различные варианты предлагаются для оценки коэффициента мощности и эффективности, согласно имеющимся данным. Результаты предлагаемых методов сравниваются с информацией коммерческих каталогов. Анализ проводится с двигателями различной мощности и скорости, что показывает, что для указанных целей достигнута хорошая точность.
Ключевые слова: КПД, коэффициент мощности, асинхронные двигатели. Трехфазные асинхронные двигатели редко работают при полной нагрузке и, как следствие, влияют коэффициент мощности и эффективность. Определение этих значений для различных частичных нагрузок необходимо для программ энергосбережения в промышленных и сервисных предприятиях. В этой работе приводятся процедуры оценки мощности и эффективности при разных нагрузках. Эти процедуры являются низкими или неинвазивными, имеют хорошую точность для инженерных целей и не требуют ни сложного оборудования, ни сложных данных по сбору и обработке.

Снижение КПД
Механический КПД электродвигателя должен обязательно учитываться при выборе мотора. Очень большую роль играют потери, которые связаны с нагревом двигателя, снижением мощности, реактивными токами. Чаще всего падение КПД связано с выделением тепла, которое естественным образом происходит при работе двигателя. Причины выделения теплоты могут быть разными: двигатель может нагреваться в процессе трения, а также по электрическим и даже магнитным причинам. В качестве самого простого примера можно привести ситуацию, когда на было потрачено 1 000 рублей, а работы было произведено на 700 рублей. В таком случае коэффициент полезного действия будет равен 70%.
Приведены различные способы оценки ранее указанных параметров в зависимости от известных данных. Результаты предлагаемых процедур сравниваются с результатами каталогов производителя. Проведен сравнительный анализ с учетом двигателей с различной выходной мощностью и скоростью, и это показывает, что результаты являются точными для установленных целей.
Ключевые слова: эффективность, коэффициент мощности, асинхронные двигатели. В отрасли всегда существуют альтернативы для экономии энергии, капиталовложений или и того, и другого, замены двигателей высокоэффективными двигателями, замены подзаряженных двигателей или применения более эффективных методов управления.

Для охлаждения электрических двигателей применяются вентиляторы, которые прогоняют воздух через созданные зазоры. В зависимости от класса двигателей, нагрев может осуществляться до определенной температуры. Например, двигатели класса A могут нагреваться до 85-90 градусов, класса B - до 110 градусов. В том случае, когда температура превышает допустимую границу, это может свидетельствовать о замыкании статора.
Условия максимума коэффициента полезного действия
Прежде чем принимать такие решения, важным фактором является экономическая целесообразность предложений и время восстановления инвестиций. Определение коэффициента эффективности и мощности электродвигателей является основой для расчета потенциальной экономии и выполнения этих оценок. Проблемами с оценкой коэффициента мощности и мощности трехфазного асинхронного двигателя в полевых условиях являются инвазивность метода, его сложность и затраты, связанные с измерениями, для оценки выходной мощности.
Средний КПД электрических двигателей
Стоит отметить, что КПД электродвигателя постоянного тока (и переменного тоже) изменяется в зависимости от нагрузки:
- При холостом ходе КПД равен 0%.
- При нагрузке 25% КПД равен 83%.
- При нагрузке 50% КПД равен 87%.
- При нагрузке 75% КПД равен 88%.
- При нагрузке 100% КПД равен 87%.
Одна из причин падения коэффициента полезного действия - асимметрия токов, когда подается разное напряжение на каждой из трех фаз. Если, к примеру, на первой фазе будет напряжение 410 В, на второй - 403 В, а на третьей - 390 В, то среднее значение будет равно 401 В. Асимметрия в данном случае будет равна разнице между максимальным и минимальным напряжением на фазах (410-390), то есть 20 В. Формула КПД электродвигателя для расчета потерь будет иметь вид в нашей ситуации: 20/401*100 = 4.98%. Это значит, что мы теряем 5% КПД при работе из-за разности напряжений на фазах.
Повышение эффективности электродвигателей
Существует множество методов для расчета этих параметров. Анализ этих, показывает, что, в общем, наименее инвазивные и простые, являются неточными, особенно при низких нагрузках. Другие инвазивны в большей или меньшей степени. Такие методы, как крутящий момент в воздушном зазоре и те, которые используют генетические алгоритмы, которые являются довольно точными и неинвазивными, усложняются необходимым оборудованием и получением и обработкой требуемых данных. На это в значительной степени влияет тот факт, что в большинстве случаев величины и ошибки в их расчетах при разных состояниях нагрузки компенсируются автоматическим регулированием банков конденсаторов или они считаются мало экономическими или оперативными, Однако правильно продуманный проект энергоэффективности должен учитывать коэффициент мощности двигателей, поскольку это всегда будет означать стоимость из-за его влияния на оплату счета за электричество, стоимость компенсации реагента, его влияние на поведение системы.

Общие потери и падение КПД
Негативных факторов, которые оказывают влияние на падение КПД электродвигателя, очень много. Есть определенные методики, позволяющие их определять. К примеру, можно определить, есть ли зазор, через который частично передается мощность из сети к статору и далее - на ротор.
Упрощенные процедуры представлены в литературе для определения коэффициента мощности и эффективности в разных состояниях нагрузки, стремящихся к низкой инвазивности. Цель этой работы - представить практические процедуры для оценки коэффициента мощности и эффективности трехфазных низковольтных двигателей при разных состояниях нагрузки, которые с точностью в соответствии с инженерными целями с минимальной инвазивностью и в то же время, не присутствующие для сложностей пользователя или оборудования или сбора и обработки данных.
Коэффициент мощности определяется первоначально. С другой стороны, можно уменьшить количество дополнительных данных, изменив форму, указанную в уравнении. Из круговой диаграммы, показанной на рисунке, выводится следующее. Где: λ, - значение максимального момента по отношению к моменту при заданной частичной нагрузке.
Потери в стартере также имеют место, и они состоят из нескольких значений. В первую очередь это могут быть потери, имеющие отношение к вихревым токам и перемагничиванию сердечников статора.
Если двигатель асинхронный, то имеют место дополнительные потери из-за зубцов в роторе и статоре. Также в отдельных узлах двигателя могут возникать вихревые токи. Все это в сумме снижает КПД электродвигателя на 0,5%. В асинхронных моторах учитываются все потери, которые могут возникать при работе. Поэтому диапазон коэффициента полезного действия может варьироваться от 80 до 90%.
Однако иногда невозможно провести вакуумный тест для определения тока в этом состоянии, и это значение не предлагается в каталоге, что является частым случаем. С помощью этой процедуры от коррекции не требуется через. В этих ситуациях приемлемое решение может быть достигнуто с помощью аппроксимации этого параметра. Таким образом, была изучена популяция 98 низковольтных двигателей в диапазоне от 0, 18 до 370 кВт.
Сравнительное исследование методов оценки коэффициента мощности. Для оценки эффективности при частичных нагрузках в позах. Номинальные потери меди на роторе рассчитываются с помощью. В нем показаны значения эффективности одного и того же трехфазного двигателя мощностью 22 кВт, используемые для анализа с точки зрения коэффициента мощности. Значения для разных состояний нагрузки рассчитываются с использованием предлагаемой методологии. Подобно оценке коэффициента мощности, наибольшие отклонения в эффективности достигаются для состояний легкой нагрузки и нагрузок выше номинального.
Автомобильные двигатели
История развития электрических двигателей начинается с момента открытия Согласно ему, индукционный ток всегда движется таким образом, чтобы противодействовать вызывающей его причине. Именно эта теория легла в основу создания первого электрического двигателя.
Современные модели основаны на этом же принципе, однако кардинально отличаются от первых экземпляров. Электрические моторы стали намного мощнее, компактнее, но самое главное - их КПД значительно увеличился. Мы уже писали выше о том, какой КПД электродвигателя, и по сравнению с двигателем внутреннего сгорания это потрясающий результат. К примеру, максимальный КПД двигателя внутреннего сгорания достигает 45%.
В нем показаны оценочные кривые эффективности, учитывая разные пропорции между потерями меди статора и величинами ротора. Наилучшие результаты получены с учетом потерь на статоре и роторе. В таблице 4 проверяется, что для разных степеней и количества полюсов ошибки не превышают 5%. При оценке эффективности ошибки находятся в одном и том же порядке, независимо от скорости. Во всех случаях ошибки возрастают при низком проценте нагрузки. В этой ситуации, что касается коэффициента мощности, более точные результаты могут быть достигнуты, если вакуумный тест включен в этот метод.
Преимущества электрического двигателя
Высокий КПД - это главное достоинство подобного мотора. И если двигатель внутреннего сгорания тратит более 50% энергии на нагрев, то в электрическом моторе на нагрев уходит небольшая часть энергии.
Вторым преимуществом является небольшой вес и компактные размеры. Например, компания Yasa Motors создала мотор с весом всего 25 кг. Он способен выдавать 650 Нм, что очень приличный результат. Также такие моторы долговечные, не нуждаются в коробке передач. Многие владельцы электрокаров говорят об экономичности электрических двигателей, что логично в некоторой степени. Ведь при работе электромотор не выделяет никаких продуктов сгорания. Однако многие водители забывают о том, что для производства электроэнергии необходимо использовать уголь, газ или Все эти элементы загрязняют окружающую среду, поэтому экологичность электродвигателей - это очень спорный вопрос. Да, они не загрязняют воздух в процессе работы. За них это делают электростанции при производстве электроэнергии.
Как можно видеть, в дополнение к численным результатам характеристики получаются графически. Определение эффективности и коэффициента мощности асинхронных двигателей в разных состояниях нагрузки является основой для расчета экономии в промышленности и услугах за счет замены стандартных двигателей другими высокоэффективными двигателями, замены недогруженные двигатели, использование более эффективных средств контроля и другие меры. Для общего случая, когда значения коэффициента мощности и эффективности при разных нагрузках отсутствуют в низковольтных двигателях, были разработаны практические процедуры для их оценки с точностью в соответствии с инженерными потребностями низкой инвазивности, а не они представляют сложности ни оборудования, ни приобретения и обработки данных.
Повышение эффективности электродвигателей
Электрические двигатели обладают некоторыми недостатками, которые плохо влияют на эффективность работы. Это слабый пусковой момент, высокий пусковой ток и несогласованность механического момента вала с механической нагрузкой. Это приводит к тому, что КПД устройства снижается.
Максимальный КПД электродвигателя
Для оценки коэффициента мощности приведены варианты для разных случаев: когда все необходимые данные могут быть получены из пластины и из каталога производителя; когда пустой ток не может быть известен; и когда ни тот, ни максимальный момент на единицу не известны. Что касается расчета эффективности при разных значениях нагрузки, были разработаны два варианта. При исследованиях, аналогичных случаю коэффициента мощности, очевидно, что ошибки находятся в одном и том же порядке, независимо от скорости, и что они больше при низких процентах нагрузки.
Для повышения эффективности стараются обеспечить нагрузку двигателя до 75% и выше и увеличивать коэффициенты мощности. Также есть специальные приборы для регулирования частоты подаваемого тока и напряжения, что тоже приводит к повышению эффективности и росту КПД.
Одним из самых популярных приборов для увеличения КПД электродвигателя является устройство плавного пуска, которое ограничивает скорость роста пускового тока. Также уместно использовать и изменения скорости вращения мотора путем изменения частоты напряжения. Это приводит к снижению расхода электроэнергии и обеспечивает плавный пуск двигателя, высокую точность регулировки. Также увеличивается пусковой момент, а при переменной нагрузке стабилизируется скорость вращения. В результате эффективность электродвигателя повышается.
Максимальный КПД электродвигателя
В зависимости от типа конструкции, коэффициент полезного действия в электрических двигателях может варьироваться от 10 до 99%. Все зависит от того, какой именно это будет двигатель. Например, КПД электродвигателя насоса поршневого типа составляет 70-90%. Конечный результат зависит от производителя, строения устройства и т. д. То же самое можно сказать и про КПД электродвигателя подъемного крана. Если он равен 90%, то это значит, что 90% потребляемой электроэнергии пойдет на выполнение механической работы, остальные 10% - на нагрев деталей. Все же есть наиболее удачные модели электродвигателей, коэффициент полезного действия которых приближается к 100%, но не равен этому значению.

Возможен ли КПД свыше 100%?
Ни для кого не секрет, что электрические двигатели, КПД которых превышает 100%, не могут существовать в природе, так как это противоречит основному закону о сохранении энергии. Дело в том, что энергия не может взяться из ниоткуда и точно так же исчезнуть. Любой двигатель нуждается в источнике энергии: бензине, электричестве. Однако бензин не вечен, как и электроэнергия, ведь их запасы приходится пополнять. Но если бы существовал источник энергии, который не нуждался в пополнении, то вполне возможно было бы создать мотор с КПД свыше 100%. Российский изобретать Владимир Чернышов показал описание двигателя, который основан на постоянном магните, и его КПД, как уверяет сам изобретатель, составляет более 100%.
Гидроэлектростанция как пример вечного двигателя
Для примера возьмем гидроэлектростанцию, где энергия вырабатывается за счет падения с большой высоты воды. Вода вращает турбину, и та производит электричество. Падение воды осуществляется под действием гравитации Земли. И хотя работа по производству электроэнергии совершается, гравитация Земли не становится слабее, то есть сила притяжения не уменьшается. Далее вода под действием солнечных лучей испаряется и снова поступает в водохранилище. На этом цикл завершается. В результате электроэнергия выработана, затраты на ее производство возобновлены.
Конечно, можно сказать, что Солнце не вечно, это так, но пару-тройку миллиардов лет оно протянет. Что касается гравитации, то она постоянно совершает работу, вытягивая влагу из атмосферы. Если сильно обобщить, то гидроэлектростанция - это двигатель, который преобразует механическую энергию в электрическую, и его КПД составляет более 100%. Это дает понять, что искать пути создания электродвигателя, КПД которого может быть более 100%, прекращать не стоит. Ведь не только гравитацию можно использовать в качестве неисчерпаемого источника энергии.
Постоянные магниты как источники энергии для двигателей
Второй интересный источник - постоянный магнит, который ниоткуда не получает энергию, а магнитное поле не расходуется даже при совершении работы. Например, если магнит что-либо притянет к себе, то он выполнит работу, а его магнитное поле слабее не станет. Это свойство уже не раз пытались использовать для создания так называемого вечного двигателя, но пока что ничего более-менее нормального из этого не получилось. Любой механизм износится рано или поздно, но сам источник, которым является постоянный магнит, практически вечен.
Впрочем, есть специалисты, которые утверждают, что со временем постоянные магниты теряют свои силы в результате старения. Это неправда, но даже если бы и было правдой, то вернуть его к жизни можно было бы всего лишь одним электромагнитным импульсом. Двигатель, который бы требовал перезарядку раз в 10-20 лет, хоть и не может претендовать на роль вечного, но очень близко к этому подходит.
Уже было много попыток создать вечный двигатель на базе постоянных магнитов. Пока что не было удачных решений, к сожалению. Но учитывая тот факт, что спрос на такие двигатели есть (его просто не может не быть), вполне возможно, что в скором будущем мы увидим что-то, что очень близко подойдет к модели вечного мотора, который будет работать на возобновляемой энергии.
Заключение
КПД электродвигателя - это самый важный параметр, который определяет эффективность работы того или иного мотора. Чем выше КПД, тем лучше мотор. В двигателе с КПД 95% почти вся затрачиваемая энергия уходит на выполнение работы и только 5% расходуется не по нужде (например, на нагрев запчастей). Современные дизельные двигатели могут достигать значения КПД 45%, и это считается классным результатом. КПД бензиновых двигателей и того меньше.
Министерство образования и науки Российской Федерации
ГОУ ВПО Южно-Уральский государственный университет
Филиал в г. Златоусте
Двигатели постоянного тока
ЗД-431.583.270102
Выполнил: Шарипова Ю.Р.
Группа: ЗД-431
Проверил: Румянцев.Е.
1. Введение
2. Устройство и принцип действия двигателей постоянного тока
3. Пуск двигателей
4. Технические данные двигателей
5. Кпд двигателей постоянного тока
6 Характеристики двигателя постоянного тока
6.1 Рабочие характеристики
6.2 Механическая характеристика
7. Список используемой литературы
1.Введение
Электрические машины постоянного тока широко применяются в различных отраслях промышленности.
Значительное распространение электродвигателей постоянного тока объясняется их ценными качествами: высокими пусковым, тормозным и перегрузочным моментами, сравнительно высоким быстродействием, что важно при реверсировании и торможении, возможностью широкого и плавного регулирования частоты вращения.
Электродвигатели постоянного тока используют для регулируемых приводов, например, для приводов различных станков и механизмов. Мощности этих электродвигателей достигают сотен киловатт. В связи с автоматизацией управления производственными процессами и механизмами расширяется область применения маломощных двигателей постоянного тока общего применения мощностью от единиц до сотен ватт.
В зависимости от схемы питания, обмотки возбуждения машины постоянного тока разделяются на несколько типов (с независимым, параллельным, последовательным и смешанным возбуждением).
Ежегодный выпуск машин постоянного тока в РФ значительно меньше выпуска машин переменного тока, что обусловлено дороговизной двигателей постоянного тока.
Вначале создавались машины постоянного тока. В дальнейшем они в значительной степени были вытеснены машинами переменного тока. Благодаря возможности плавного и экономичного регулирования скорости вращения двигатели постоянного тока сохраняют свое доминирующее значение на транспорте, для привода металлургических станков, в крановых и подъемно-транспортных механизмах. В системах автоматики машины постоянного тока широко используются в качестве исполнительных двигателей, двигателей для привода лентопротяжных самозаписывающих механизмов, в качестве тахогенераторов и электромашинных усилителей.
2. Устройство и принцип действия двигателей постоянного тока
Устройство машин постоянного тока (генераторов и двигателей) в упрощенном виде показано на рис.1. К стальному корпусу 1 статора машины прикреплены главные 2 и дополнительные 4 полюса. На главных полюсах расположена обмотка возбуждения 3, на дополнительных - обмотка дополнительных полюсов 5. Обмотка возбуждения создает магнитный поток Ф машины.
Рис.1
На валу 10 двигателя закреплен цилиндрический магнитопровод 6, в пазах которого расположена обмотка якоря 7. Секции обмотки якоря присоединены к коллектору 9. К нему же прижимаются пружинами неподвижные щетки 8. Закрепленный на валу двигателя коллектор состоит из ряда изолированных от него и друг от друга медных пластин. С помощью коллектора, и щеток осуществляется соединение обмотки якоря с внешней электрической цепью. У двигателей они, кроме того, служат для преобразования постоянного по направлению тока внешней цепи в изменяющийся по направлению ток в проводниках обмотки якоря.
Дополнительные полюса с расположенной на них обмоткой уменьшают искрение между щетками и коллектором машины. Обмотку дополнительных полюсов соединяют последовательно с обмоткой якоря и на электрических схемах часто не изображают.
Для уменьшения потерь мощности магнитопровод якоря выполнен из отдельных стальных листов. Все обмотки изготовлены из изолированного провода.Кроме двигателей, имеющих два главных полюса, существуют машины постоянного тока с четырьмя и бόльшим количеством главных полюсов. При этом соответственно увеличивается количество дополнительных полюсов и комплектов щеток.
Если двигатель включен в сеть постоянного напряжения, то при взаимодействии магнитного поля, созданного обмоткой возбуждения, и тока в проводниках якоря возникает вращающий момент, действующий на якорь:
![]() (1)
(1)
где КМ - коэффициент, зависящий от конструктивных параметров машины; Ф - магнитный поток одного полюса; IЯ - ток якоря.
Если момент двигателя при n = 0 превышает тормозящий момент, которым нагружен двигатель, то якорь начнет вращаться. При увеличении частоты вращения n возрастает индуцируемая в якоре ЭДС. Это приводит к уменьшению тока якоря:
![]() (3)
(3)
где rЯ - сопротивление якоря.
Следствием уменьшения тока IЯ является уменьшение момента двигателя. При равенстве моментов двигателя и нагрузки частота вращения перестает изменяться.
Направление момента двигателя и, следовательно, направление вращения якоря зависят от направления магнитного потока и тока в проводниках обмотки якоря. Чтобы изменить направление вращения двигателя, следует изменить направление тока якоря либо тока возбуждения.
3. Пуск двигателей
Из формулы (3) следует, что в первое мгновение после включения двигателя в сеть постоянного напряжения, т.е. когда и ,
Так как сопротивление rЯ невелико, то ток якоря может в 10…30 раз превышать номинальный ток двигателя, что недопустимо, поскольку приведет к сильному искрению и разрушению коллектора. Кроме того, при таком токе возникает недопустимо большой момент двигателя, а при частых пусках возможен перегрев обмотки якоря.
Чтобы уменьшить пусковой ток в цепи якоря, включают пусковой резистор, сопротивление которого по мере увеличения частоты вращения двигателя уменьшают до нуля. Если пуск двигателя автоматизирован, то пусковой резистор выполняют из нескольких ступеней, которые выключают последовательно по мере увеличения частоты вращения.
Пусковой ток якоря
![]()
По мере разгона двигателя в обмотке якоря возрастает ЭДС, а как следует из формулы (3), это приводит к уменьшению тока якоря IЯ. Поэтому по мере увеличения частоты вращения двигателя сопротивление в цепи якоря уменьшают. Чтобы при сравнительно небольшом пусковом токе получить большой пусковой момент, пуск двигателя осуществляют с наибольшим магнитным потоком. Следовательно, ток возбуждения при пуске должен быть максимально допустимым, т.е. номинальным.
4.Технические данные двигателей
В паспорте двигателя и справочной литературе на двигатели постоянного тока указаны следующие технические данные: номинальные напряжение Uи, мощность Pн, частота вращения nн, ток Iн, КПД.
Под номинальным Uн понимают напряжение, на которое рассчитаны обмотка якоря и коллектор, а также в большинстве случаев и параллельная обмотка возбуждения. С учетом номинального напряжения выбирают электроизоляционные материалы двигателя.
Номинальный ток Iн – максимально допустимый ток (потребляемый из сети), при котором двигатель нагревается до наибольшей допустимой температуры, работая в том режиме (длительном, повторно-кратковременном, кратковременном), на который рассчитан:
![]()
где Iян - ток якоря при номинальной нагрузке; Iвн – ток обмотки возбуждения при номинальном напряжении.
Следует отметить, что ток возбуждения Iвн двигателя параллельного возбуждения сравнительно мал, поэтому при номинальной нагрузке обычно принимают
Номинальная мощность Рн - это мощность, развиваемая двигателем на валу при работе с номинальной нагрузкой (моментом) и при номинальной частоте вращения nн.
Частота вращения nн, и КПД соответствуют работе двигателя с током Iн, напряжением Uн без дополнительных резисторов в цепях двигателя.
В общем случае мощность на валу P2, момент М и частота вращения n связаны соотношением:
Потребляемая двигателем из сети мощность Р1, величины P2, КПД, U, I связаны соотношениями:
Очевидно, что эти соотношения справедливы также и для номинального режима работы двигателя.
5. КПД двигателей постоянного тока
Коэффициент полезного действия является важнейшим показателем двигателей постоянного тока. Чем он больше, тем меньше мощность Р и ток I, потребляемые двигателем из сети при одной и той же механической мощности. В общем виде зависимостьть такова:
![]() (9)
(9)
где - потери в обмотке якоря; - потери в обмотке возбуждения; - потери в магнитопроводе якоря; - механические потери.
Потери мощности не зависят, и мало зависят от нагрузки двигателя.
Двигатели рассчитываются таким образом, чтобы максимальное значение КПД было в области, близкой к номинальной мощности. Эксплуатация двигателей при малых нагрузках нежелательна вследствие малых значений rя. Значения КПД двигателей с различными способами возбуждения и мощностью от 1 до 100 кВт при номинальной нагрузке разные и составляют в среднем 0,8.
6.Характеристики двигателей постоянного тока
6.1. Рабочие характеристики
Рабочими называются регулировочная, скоростная, моментная и к.п.д. характеристики.
Регулировочная характеристика
Регулировочная характеристика представляет зависимость скорости вращения П от тока Iв возбуждения в случае, если ток Iа якоря и напряжение U сети остаются неизменными, т. е. n=f(Iв) при Ia=const и U=const.
До тех пор, пока сталь магнитопривода машины не насыщена, поток Ф изменяется пропорционально току возбуждения Iв. В этом случае регулировочная характеристика является гиперболической. По мере насыщения при больших токах Iв характеристика приближается к линейной (рис. 2). При малых значениях тока Iв скорость вращения резко возрастает. Поэтому при обрыве цепи возбуждения двигателя (Iв = 0) с параллельным возбуждением скорость его вращения достигает недопустимых пределов, как говорят: «Двигатель идет вразнос». Исключение могут составлять микродвигатели, которые имеют относительно большой момент М0 холостого хода.
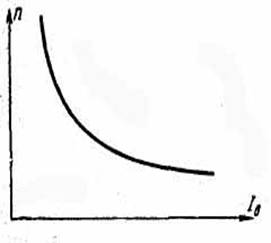
Рис. 2. Регулировочная характеристика двигателя
В двигателях последовательного возбуждения Iв = Iа. При малых нагрузках ток якоря Iа мал и скорость вращения может быть слишком большой, поэтому пуск и работа при малых нагрузках недопустимы. Микродвигатели так же, как и. в предыдущем случае, могут составлять исключение.
Скоростные характеристики.
Скоростные характеристики дают зависимость скорости вращения п от полезной мощности Р2 на валу двигателя в случае, если напряжение U сети и сопротивление rв регулировочного реостата цепи возбуждения остаются неизменными, т. е. n=f(P2), при U=const и rв = const.
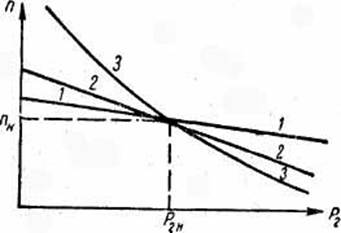
Рис. 3. Скоростные характеристики
С возрастанием тока якоря при увеличении механической нагрузки двигателя параллельного возбуждения одновременно увеличивается падения напряжения в якоре и появляется реакция якоря, которая обычно действует размагничивающим образом. Первая причина стремится уменьшить скорость вращения двигателя, вторая - увеличить. Действие падения напряжения в якоре обычно оказывает большее влияние. Поэтому скоростная характеристика двигателя параллельного возбуждения имеет слегка падающий характер (кривая 1, рис. 3).
В двигателе последовательного возбуждения ток якоря является током возбуждения. В результате скоростная характеристика двигателя с последовательным возбуждением имеет характер, близкий к гиперболическому. При увеличении нагрузки по мере насыщения магнитной цепи характеристика приобретает более прямолинейный характер (кривая 3 на рис. 3).
В компаундном двигателе при согласном включении обмоток скоростная характеристика занимает промежуточное положение между характеристиками двигателя параллельного и последовательного возбуждения (кривая 2).
Моментные характеристики.
Моментные характеристики показывают, как изменяется момент М при изменении полезной мощности Р2 на валу двигателя, если напряжение U сети и сопротивление rв регулировочного реостата в цепи возбуждения остаются неизменными, т. е. М = f(P2), при U=const, rв=const.
Полезный момент на валу двигателя
Если скорость вращения двигателя параллельного возбуждения не изменялась бы с нагрузкой, то зависимость момента Ммех от полезной мощности графически представляла бы прямую линию, проходящую через начало координат. В действительности скорость вращения с увеличением нагрузки падает. Поэтому характеристика полезного момента несколько загибается кверху (кривая 2, рис. 4). При этом кривая электромагнитного момента М проходит выше кривой полезного момента Ммех на постоянную величину, равную моменту холостого хода М0 (кривая 1).
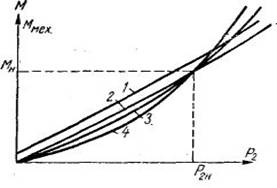
Рис. 4. Моментные характеристики
В двигателе последовательного возбуждения вид моментной характеристики приближается к параболическому, так как изменение момента от тока нагрузки происходит, по закону параболы, пока сталь не насыщена. По мере насыщения зависимость приобретает более прямолинейный характер (кривая 4). В компаундном двигателе моментная характеристика (кривая 3) занимает промежуточное положение между характеристиками двигателя параллельного и последовательного возбуждения.
Характеристика изменения коэффициента полезного действия.
Кривая зависимости к. п. д. от нагрузки имеет характерный для всех двигателей вид (рис 5). Кривая проходит через начало координат и быстро растет при увеличении полезной мощности до 1/4 номинальной. При мощности Р2, равной примерно 2/3 номинальной, к. п. д. обычно достигает максимального значения. При увеличении нагрузки до номинальной к. п. д. остается постоянным или незначительно падает.
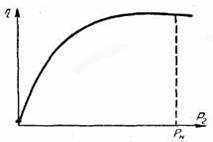
Рис. 5. Изменение к. п. д. двигателя
6.2 Механическая характеристика
Важнейшей характеристикой двигателя является механическая n(M). Она показывает, как зависит частота вращения двигателя от развиваемого момента. Если к обмоткам двигателя подведены номинальные напряжения и отсутствуют дополнительные резисторы в его цепях, то двигатель имеет механическую характеристику, называемую естественной. На естественной характеристике находится точка, соответствующая номинальным данным двигателя (Мн, Ря и т.д.). Если же напряжение на обмотке якоря меньше номинального, либо Iв < Iвн, то двигатель будет иметь различные искусственные механические характеристики. На этих характеристиках двигатель работает при пуске, торможении, реверсе и регулировании частоты вращения.
Преобразовав выражение (3) относительно частоты вращения, получим уравнение электромеханической характеристики n(Iя):
![]() (7)
(7)
После замены в уравнении (7) тока Iя согласно формуле (1), получим уравнение механической характеристики n(М):
![]() (8)
(8)
При Ф = соnst, электромеханическая n(Iя) и механическая n(М) характеристики двигателя параллельного возбуждения представляют собой прямые линии. Так как за счет реакции якоря магнитный поток немного изменяется, то характеристики в действительности несколько отличаются от прямых.
При работе вхолостую (М = 0) двигатель имеет частоту вращения холостого хода, определяемую первым членом уравнения (8). С увеличением нагрузки n уменьшается. Как следует из уравнения (8), это объясняется наличием сопротивления якоря rя.
Поскольку rя не велико, частота вращения двигателя при увеличении момента изменяется мало, и двигатель имеет жесткую естественную механическую характеристику (рис.6, характеристика 1).
Из уравнения (8) следует, что регулировать частоту вращения при заданной постоянной нагрузке (М = const) можно тремя способами:
а) изменением сопротивления цепи якоря;
б) изменением магнитного потока двигателя;
в) изменением напряжения на зажимах якоря.
![]()
Рис. 6 Механические характеристики
Для регулирования частоты вращения первым способом в цепь якоря. должно быть включено добавочное сопротивление rд. Тогда сопротивление в уравнении (8) необходимо заменить на rя + rд.
Как следует из уравнения (8), частота вращения n связана с сопротивлением цепи якоря rя + rд при постоянной нагрузке (М = const) линейной зависимостью, т.е. при увеличении сопротивления частота вращения уменьшается. Разным сопротивлениям rд соответствуют различные искусственные механические характеристики, одна из которых приведена на рис.2 (характеристика 2). С помощью характеристики 2 при заданном моменте М1 можно получить частоту вращения n2.
Изменение частоты вращения вторым способом осуществляется с помощью регулируемого источника напряжения UD2. Изменяя его напряжение регулятором R2, можно изменить ток возбуждения IВ и тем самым магнитный поток двигателя. Как видно из уравнения (8), при постоянной нагрузке (М = соnst) частота вращения находится в сложной зависимости от магнитного потока Ф. Анализ уравнения (8) показывает, что в некотором диапазоне изменения магнитного потока Ф уменьшение последнего приводит к увеличению частоты вращения. Именно этот диапазон изменения потока используют при регулировании частоты вращения.
Каждому значению магнитного потока соответствует искусственная механическая характеристика двигателя, одна из которых приведена на рис.2 (характеристика 4). С помощью характеристики 4 при моменте М1 можно получить частоту вращения n4.
Чтобы регулировать частоту вращения изменением напряжения на зажимах якоря, необходимо иметь относительно мощный регулируемый источник напряжения. Каждому значению напряжения соответствует искусственная механическая характеристика двигателя, одна из которых приведена на рис.2 (характеристика 3). С помощью характеристики 3 при заданном моменте М1 можно получить частоту вращения n3.
Список используемой литературы
1. Кацман М.М. Электрические машины. -М.: Высш. шк., 1993.
2. Копылов И.П. Электрические машины. -М.: Энергоатомиздат, 1986